En partenariat avec Eni (fournisseur d'électricité et de gaz), le laboratoire MIT Mobile Experience Laboratory a présenter lors de la Maker Faire 2015 de Rome un ensemble d'équipements connectés destinés à la prévention des accidents en milieu industriel complexe, comme les plateformes pétrolières.
Détails
L'équipement présenté se compose de :
- Un gilet avec différentes sources de retour haptique (les alertes sonores étant parfois inaudibles selon les environnements industriels), des électrodes pour surveiller la fréquence cardiaque, des capteurs mesurant l'inspiration, l'expiration et l'orientation.
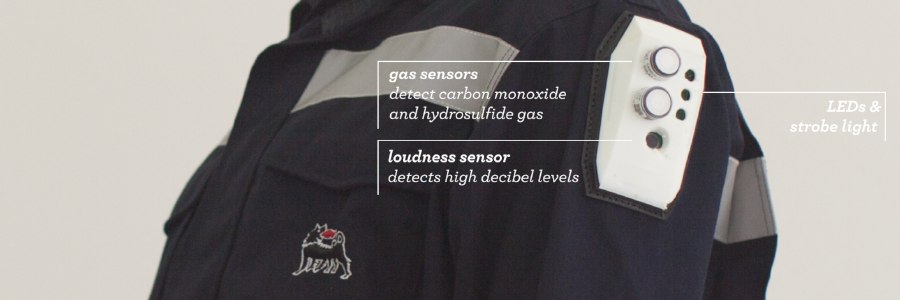
- Une veste de sécurité embarquant des détecteurs de monoxyde de carbone, d'hydrosulfyde, de sons ambiants, de température, d'humidité, un altimètre mesurant la différence de hauteur entre le sol et l'utilisateur (chute) et d'un système de LED stroboscopique. Une carte électronique dans le dos de la veste assure la collecte des données et la communication avec le poste de contrôle.
- Un mousqueton de sécurité détectant le verrouillage de ce dernier, couplé à un module de communication.
- Une paire de chaussure de sécurité dont chacune des chaussures est composée d'une semelle reliée à une batterie (talon), qui elle, alimente en temps réel la collecte d'informations des dix capteurs flexibles répartis sous la semelle.
Ma contribution à ce projet s'est portée sur les chaussures connectées. Nous avions besoin de connaitre en temps réel la position de l'ouvrier en fonction des valeurs renvoyées par l'ensemble des capteurs. Les différentes positions que nous souhaitions analyser était :
-> debout en attente
-> en train de marcher
-> pieds décollés du sol
-> soulevé d'un poids léger
-> soulevé d'un poids lourd
Pour réussir cet algorithme j'ai utilisé un réseau de neurones pour déterminer les poids (10 variables) de l'équation me permettant de classer les résultats de mes capteurs en fonction des classes "d'activité de l'ouvrier", soit C0 pour la station debout et ainsi de suite jusqu'à C4 pour le soulevé d'un poids lourd.
Couplé à un jeu de donnés référence : l'expert benchmark comprenant environ un millier de valeurs par capteurs ; l'apprentissage nous a donné un taux de succès de 91,27%, un résultat qui serait perfectible avec plus de données d'entrées.
Livrables
Algorithme temps réel de détermination des différents états de l'utilisateur dans ses chaussures